|
|
|
|
Suppose the light source (S), lensing mass ![]() (L) and observer (O) are
exactly aligned, as in Fig.12.1. Also assume they are all
point like (i.e. not extended like for example a galaxy). Light rays
from S are deflected by L over an angle
(L) and observer (O) are
exactly aligned, as in Fig.12.1. Also assume they are all
point like (i.e. not extended like for example a galaxy). Light rays
from S are deflected by L over an angle ![]() toward O. Because of
symmetry of the situation, O sees a ring of light around L: an Einstein
ring. Of course the figure is not to scale:
toward O. Because of
symmetry of the situation, O sees a ring of light around L: an Einstein
ring. Of course the figure is not to scale: ![]() should be small if
we want to apply the lensing equation.
should be small if
we want to apply the lensing equation.
Introducing the distances between observer and lens ![]() , observer
and source
, observer
and source ![]() , and lens and source
, and lens and source  , we can compute
, we can compute ![]() and the angle
and the angle 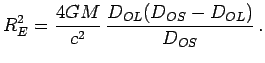 under which O sees the ring. Since
under which O sees the ring. Since
![]() we get, using the lensing equation and the figure,
we get, using the lensing equation and the figure,
 |
(12.4) |
and hence
 |
(12.5) |
If O, L and S are not aligned, as in Fig.12.2, then O does not
see a ring. Denote the angular position of S from the line OL by
 , and the angle between S and its image I by
, and the angle between S and its image I by ![]() . Then
from the figure you see that
. Then
from the figure you see that
![]() . A bit of juggling
and using the lensing equation gets you to:
. A bit of juggling
and using the lensing equation gets you to:
 |
(12.6) |
This is a quadratic equation for ![]() for a given and
so there will be two images, at positions
for a given and
so there will be two images, at positions
![]() .
.
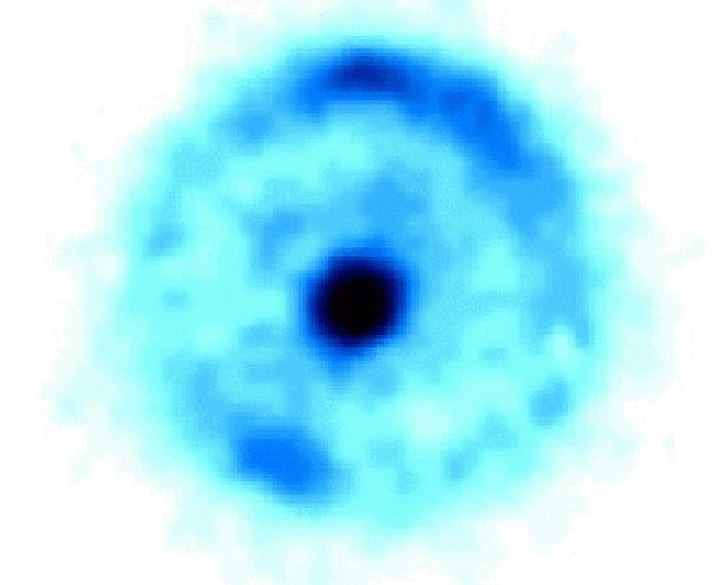
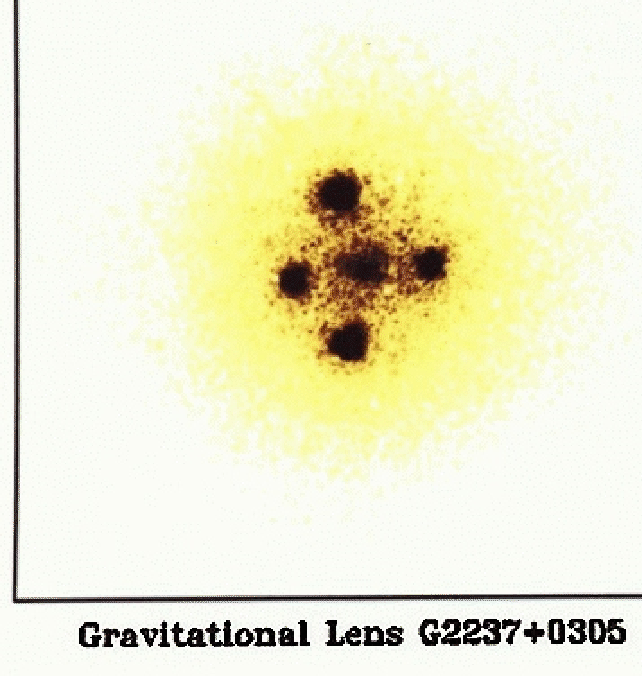
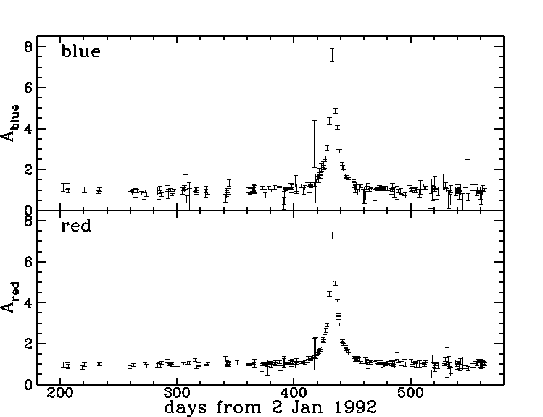
Often, the change in position will be very small and not
observable. But besides being lensed, an image will also be magnified (or de-magnified). So when the displacement is too small to
see two images, you'll only see one but magnified by total
magnification of each image separately. Interestingly, for
a small fraction of peculiar alignments, ![]() may diverge, and so
potentially you can get very large amplifications.
may diverge, and so
potentially you can get very large amplifications.